| Главная | Неоцен |
Герт ван Дейк
Ноги, на которых стоят
Среда, 22 сентября 2010 года
Когда я рисую крупное инопланетное животное, его ноги будут похожи по форме скорее на ноги земных существ, но живущие своей собственной жизнью. В зависимости от образа жизни в целом, ноги животного похожи на конечности млекопитающих, рептилий или амфибий. Когда животные размером с насекомых, их ножки, очертания которых появляются на бумаге, тонкие и торчат в стороны. Очевидно, части моего мозга, ответственные за эти закономерности, настолько глубоко настроены на жизнь на Земле, что нужно прикладывать усилие, чтобы отойти от этого. В этом я не одинок, как показывает просмотр таких сайтов, как «Спекулятивная эволюция».


Кадр из сериала «Портал юрского периода»
Желание «заинопланетнянить» животных может легко заставить пойти на хитрость
вроде раздувания плана строения членистоногого до размеров крупного млекопитающего
или снабжения животного щупальцами для ходьбы на них. Два изображения, показанных
выше, взяты из британского телесериала «Портал юрского периода» (кстати, мне
он нравится!). Герои сталкиваются с некоторыми силурийскими животными. Как
вы, наверное, знаете, в те времена существовали кое-какие впечатляющие членистоногие,
но они оказались недостаточно впечатляющими для создателей этого сериала.
И это жаль, потому что существует достаточно много способов рассказать хорошую
историю, но при этом не выглядеть глупо. Существует много разных причин, по
которым животные такого рода не могли быть столь большими, и лазать по потолку
они умели не лучше, чем вы. Во многом виноваты последствия изменения масштабов,
которые ранее уже обсуждались здесь
и здесь.
Но даже если вы примете во внимание физические ограничения, всё равно остаются
тысячи интригующих вопросов, которые следует задать. Например, если растопыренные
ноги – это плохая идея для крупных животных, то почему у маленьких животных
они есть? Почему ноги млекопитающих сложены зигзагообразно, когда следующие
друг за другом кости направлены в противоположные стороны? Почему появились
лопатки? Каково оптимальное количество сегментов в ногах? В этой записи представлены
некоторые – бессвязные – мысли по данным вопросам.
Авторское право: Герт ван Дейк
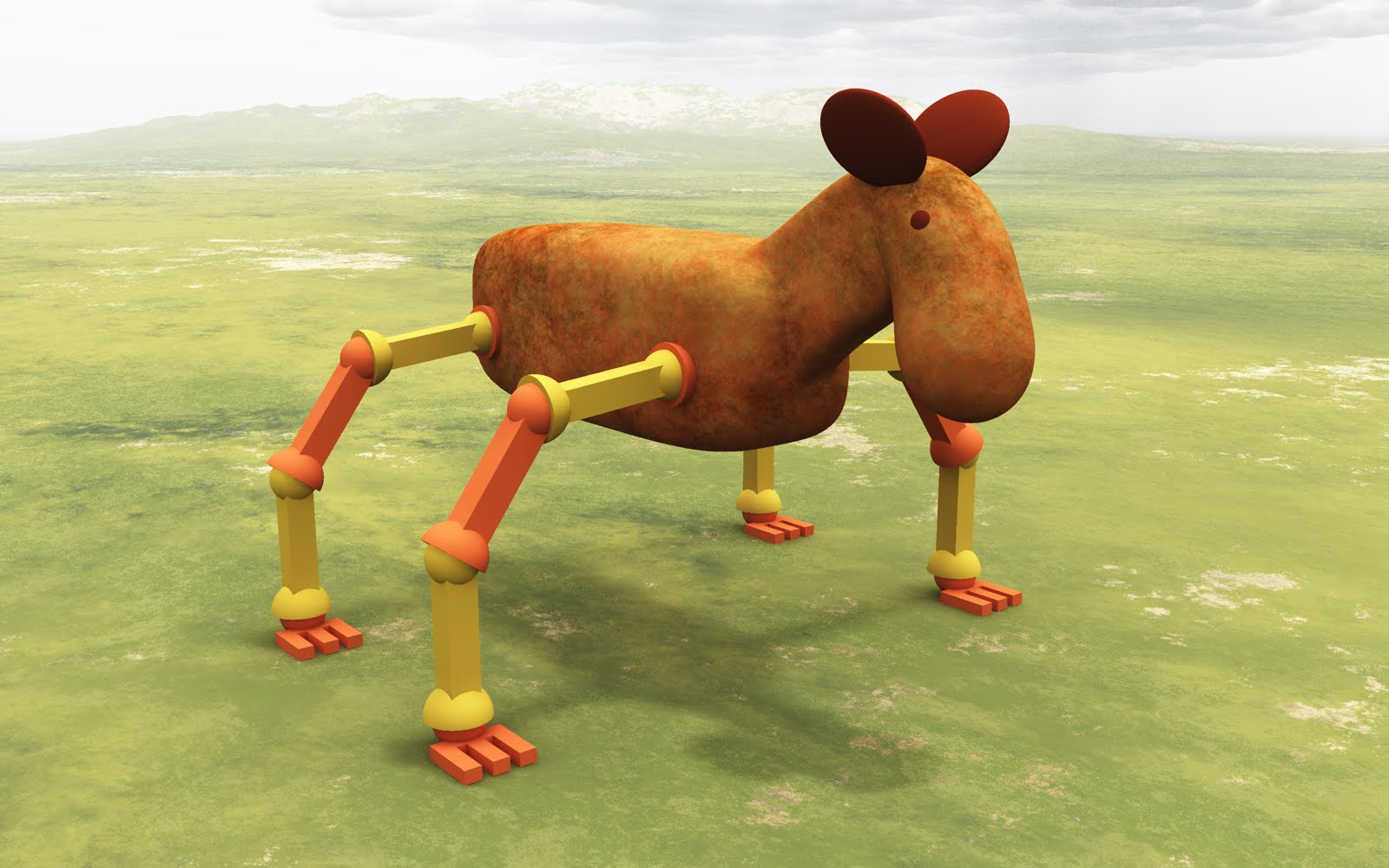
Давайте начнем с животного с ногами, растопыренными, как у насекомых. Но
размером оно не с насекомое, а с млекопитающее. У него четыре ноги, но в данный
момент это не имеет значения. На каждой ноге – по три сегмента, но и это не
главное. Все суставы шаровые; каждый из них обеспечивает вращение вокруг трёх
осей – это несколько многовато, но к этому моменту я ещё вернусь.
Похоже, что это не очень удобно, верно? А вам было бы удобно, если бы приходилось
ходить в подобном положении? Это как отжиматься целый день. Бедному зверю
(Disneius salamandris) придётся потратить много энергии, чтобы его
тело не провисало до земли. Иными словами, для удержания суставов в их текущем
положении требуется энергия. Чтобы понять, как можно минимизировать эти усилия,
потребуются некоторые знания о рычагах, векторах и крутящих моментах.

Авторское право: Герт ван Дейк
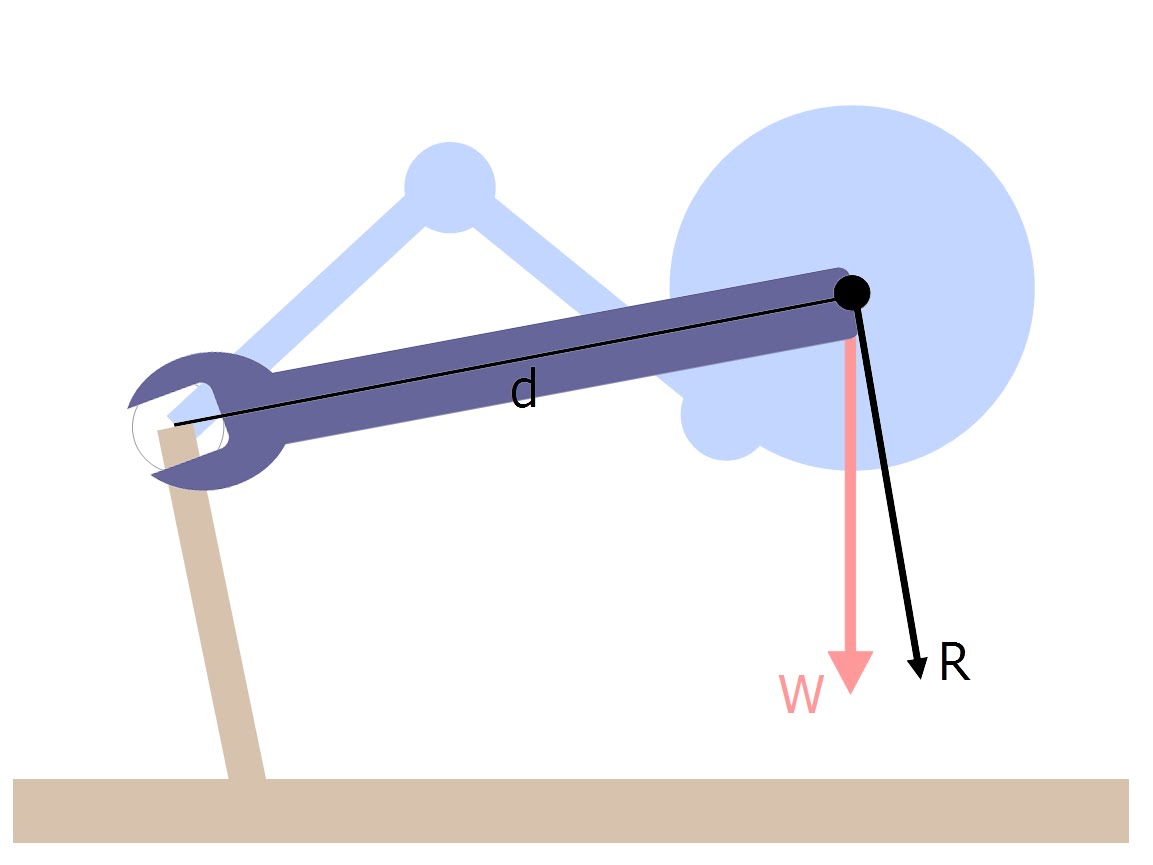
Вот рисунок тела только с одной ногой. Давайте представим, что тело и части ноги склеены вместе, и рассматривать придётся лишь один сустав (на стыке синего и коричневого). Сила тяжести воздействует на массу животного в его центре тяжести с силой, обозначенной буквой «W» (потому что вес – weight). Какое «поворотное усилие» она создаёт в суставе? Легко: соедините сустав и центр тяжести отрезком расстояния d. Теперь, используя векторы, нарисуйте компонент W, который находится под прямым углом к линии d; эта сила поворачивает сустав (отмечен чёрной стрелкой «R»). Чем длиннее стрелка, обозначающая R, тем больше усилие. Значение поворотного усилия, которое оказывается на шарнир, получается путем умножения d на F: «вращающий» или «крутящий момент».
Авторское право: Герт ван Дейк
Чтобы сделать это чуть более понятным на интуитивном уровне, я наложил на схему гаечный ключ. Гаечный ключ захватывает шарнир, а та часть, куда вы положили бы руку, находится в центре тяжести. Чтобы воспользоваться гаечным ключом, вы бы потянули его или надавили на него под прямым углом к ручке, ведь так? Это будет сила «R». Чем сильнее вы тянете, тем больше будет крутящий момент. Если бы вы воспользовались более длинным гаечным ключом, прилагая то же самое усилие, вы также получили бы больший крутящий момент. Больше усилий и более длинные ручки – вот, пожалуй, и всё, что для этого нужно. Вернёмся к D. salamandris; ему придётся самому создавать крутящий момент такой же величины, используя мышечные силы, не показанные на рисунке, чтобы сустав не двигался.

Авторское право: Герт ван Дейк
А вот такие же рассуждения, но уже в отношении другого сустава. Во всех случаях крутящий момент, результат умножения d на R, потребует больших мышечных усилий. Чтобы избежать всех этих затрат энергии, необходимо свести крутящий момент к минимуму. Вы можете уменьшить d, расположив суставы как можно ближе к центру тяжести. Минимизация R – это тоже действенно, и для этого вам нужно будет сделать линию d как можно более вертикальной: расположить суставы под корпусом. Думаю, что этот принцип также объясняет, почему ноги явно склонны сгибаться зигзагообразно: это удерживает суставы более или менее близко друг к другу и минимизирует крутящий момент, вызванный гравитацией. Итак, у бедного D. salamandris дела идут совсем неважно.

Нажмите, чтобы увеличить изображение; авторское право: Герт ван Дейк
Но прежде, чем позволить D. salamandris вымереть, давайте посмотрим, что значит поза с растопыренными ногами для анатомии суставов его ног. На рисунке сверху вы видите одну ногу в нескольких положениях, полученных путём её поворота вокруг оси в суставе, соединяющем её с телом. Чтобы получить движение, пригодное для ходьбы, его ступня должна двигаться по прямой линии спереди назад (на самом деле ступня останется на месте, но вперёд будет двигаться тело; если же смотреть со стороны тела, то назад будет двигаться именно ступня). Чтобы ступня совершила прямолинейное движение, требуется лишь слегка распрямить некоторые суставы. Но для того, чтобы ступня всегда смотрела вперёд, требуется также, чтобы существовал способ развернуть некоторые кости вокруг продольной оси. Если подумать об этом ещё немного, то вы обнаружите, что ноги, торчащие вбок, требуют довольно сложных суставов; можно подумать, что всё это просто, но на самом деле это не так.

Авторское право: Герт ван Дейк
Вот промежуточный этап в процессе вставания на собственные ноги: это животное подвело ступни под туловище, и его ноги изогнуты зигзагообразно, но большей частью вбок (заключительный этап появится в следующей записи). Это не решает всех проблем, потому что вы вполне можете спросить, почему насекомые ходят на растопыренных ногах. В конце концов, если поставить ноги под туловище так выгодно, то почему это сделали не все животные? На этот вопрос можно дать два ответа. Растопыренные и согнутые ноги не выгодны, если гравитация представляет собой большую проблему, так как поддержание ног в таком положении требует значительных мышечных усилий. Как уже обсуждалось ранее в моих записях о размерах тела, такие проблемы очень быстро возникают, когда животные становятся крупнее. Сделайте их мельче, и дополнительные затраты энергии вряд ли будут учитываться далее в общем бюджете. Кроме того, у мелких животных есть преимущество в обладании вытянутыми ногами: это помогает им не быть сдутыми ветром.

Авторское право: Герт ван Дейк
Сверху представлен рисунок, аналогичный предыдущему, но в данном случае с
горизонтально направленной силой, действующей на животных: это ветер. Сила
ветра может заставить животное опрокинуться, и опять же, составляющая силы
ветра, которая делает это, находится под прямым углом к линии, соединяющей
центр тяжести с точкой вращения: там, где ступни касаются земли. Животное
с расположенным ниже центром тяжести и шире растопыренными ногами лучше защищено
от силы ветра: сила R мала и направлена вверх, то есть вес животного противодействует
ей. Для высоконогого животного ситуация иная: R направлена вбок, силе тяжести
она не противодействует, и животному достаточно лишь немного наклониться,
чтобы центр тяжести больше не находился над его ступнями.
Опять же, определённую роль играет размерность: когда
ты очень мал, сила ветра играет относительно большую роль, чем при нашем человеческом
размере. То же самое работает, если заменить воздух водой: ходить под водой
будет очень сложно, если она течёт с некоторой скоростью. Таким образом, вертикально
поставленные ноги становятся более выгодными, когда масса животного увеличивается,
и тем более на планетах с сильной гравитацией. Горизонтальные, растопыренные
в стороны ноги лучше, когда оказаться сдутым ветром – это реальная проблема,
и это с большей вероятностью произойдет, когда масса животного очень мала,
когда атмосфера очень густа, или становится сильнее ветер. Какие ноги лучше
всего подходят, если вы – животное в мире с очень высокой гравитацией и штормовыми
ветрами, завывающими в его плотной атмосфере? Сложно сказать; возможно, у
него должны быть вертикальные ноги, выдерживающие нагрузку, а также боковые
подпорки...
Оригинал статьи находится здесь.
Ноги, на которых ходят (Ноги II)
Пятница, 8 октября 2010 года
В своей прошлой записи я обыграл некоторые концепции строения ног, касаясь
главным образом вопроса о том, какие ноги лучше иметь: растопыренные, или
работающие как колонны. Оказалось, что ответа, который всегда будет правильным,
просто не существует: крупным животным колонны помогают снизить до минимума
затраты энергии в виде мышечных усилий, а мелким животным растопыренные ноги
обеспечивают защиту от сдувания ветром, что становится всё важнее по мере
уменьшения размеров. Возможно, ветер также является одной из причин того,
что мелкие членистоногие так хорошо цепляются за поверхности: я думал, что
это главным образом просто удобная функция – цепляться за вертикальные поверхности
или даже садиться на потолок, но, возможно, это позволяет просто оставаться
на том месте, где находишься, если сильный ветер тоже влияет на тебя. А что
делают насекомые, когда на улице бушует настоящая буря? Кто-нибудь знает?
Существует ещё немало проблем, которые можно обыграть. Я взял вид Disneius,
который только что эволюционировал в прошлый раз, и решил продвинуть строение
его ног ещё на один шаг вперёд – то есть, я попытался ещё немного упростить
их конструкцию. Обоснование этого шага заключалось в том, что ноги в основном
должны двигаться в том же направлении, что и тело, и это делает движения в
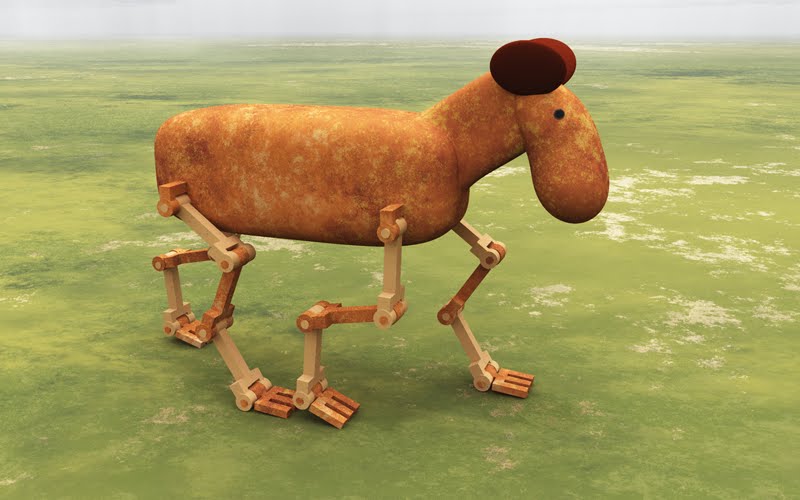
других направлениях менее важными. В результате получается Disneius mechanicus:
Авторское право: Герт ван Дейк
Вот он. В нём идея воплотилась в своей крайней форме: суставы его ног поворачиваются
исключительно вперёд и назад. Следует помнить, что в реальной жизни это не
сработало бы, потому что животное не смогло бы сделать поворот. В реальной
жизни вам стоило бы сделать ступни и хотя бы один сустав над ними более гибкими.
Ноги имеют зигзагообразное строение, как и у его предшественников. В прошлый
раз я уже рассуждал о том, что избегать изгибающих «моментов» становится тем
легче, чем ближе находятся суставы к центру тяжести. Имейте в виду, что зигзагообразные
ноги, в которых суставы направлены зигзагом внутрь и наружу, не обязательно
хуже тех, в которых изгибы зигзага направлены вперёд и назад. Обычное объяснение
анатомии ног млекопитающих состоит в том, что «вертикальное» положение лучше,
но просто предположим, что вы взяли одну из ног D. mechanicus и развернули
её на 90 градусов. Если его ступня изначально находилась непосредственно под
тазобедренным суставом, разворот этого не изменит. Углы соединения также не
изменятся. Всё это заставляет меня сделать вывод о том, что «вертикальность»
конечностей больше зависит от наличия выпрямленных ног, чем от того, в каком
направлении зигзагообразны суставы. У ног, которые движутся главным образом
взад-вперёд, преимущество состоит в том, что они позволяют создавать более
простые суставы, а более простые суставы могут позволить контролировать свое
положение при меньших затратах мышечных усилий – и это хорошо. Я бы ожидал,
что у крупных животных с усовершенствованными в процессе эволюции ногами они
также будут сгибаться взад-вперёд. Скучновато, но это то, что вы получаете
в свете универсальных законов природы.
К счастью, осталось ещё достаточно много позиций, которые смогли бы заставить
инопланетных животных выглядеть более инопланетно. Как можно увидеть, передние
и задние лапы у D. mechanicus совершенно одинаковы. Ноги млекопитающих
выглядят совсем не так. С механической точки зрения передняя и задняя ноги,
как правило, действуют по-разному, причём задние ноги обеспечивают большую
движущую силу, чем передние. Не в этом ли заключена причина того, что колени
млекопитающих направлены вперёд, а локти – назад? Похоже, что, начав с тритона,
плечи развернулись назад, а бёдра – вперёд, чтобы превратить его в млекопитающее
с ногами, движущимися в передне-заднем направлении.

Вот картинка с этого сайта, которая объясняет именно данное явление. Она объясняет, почему кости предплечья перекрещены, а кости ноги – нет. Но это всего лишь один из способов взглянуть на вещи. В том же путешествии от тритона до млекопитающего к двум сегментам тритона добавился третий большой подвижный сегмент. В передней ноге в подвижный сегмент превратилась лопатка, а в задней ноге были усилены кости стопы. Если посмотреть на результат с функциональной точки зрения, то первым крупным подвижным сегментом является лопатка в передней конечности и бедренная кость – в задней. Они обе направлены вперёд, а после них остальные сегменты направлены зигзагообразно – вначале назад, а затем вперёд. Вот, как выглядит D. mechanicus! Основываясь на этом функциональном представлении, я считаю, что идентичные передние и задние ноги теоретически вполне возможны. Длительная специализация на торможении и принятии на себя веса (передние ноги) и на толчке (задние ноги) может изменить некоторые аспекты, но я не вижу необходимости «назначать» типичный для млекопитающего план строения единственно возможным.
Авторское право: Герт ван Дейк
Что ж, вот вариант (слева), в котором верхние сегменты начинают зигзаг, указывая назад, а не вперёд, как у изображения справа. Будет ли это работать? В настоящее время я не вижу причин, исключающих это. Возможно, мне следует провести несколько исследований с использованием анимации, чтобы увидеть, не возникнет ли в данном случае каких-то больших проблем. Но если их нет, у животного могут быть передние ноги, которые начинаются с «зига», и задние, начинающиеся с «зага», или наоборот. Они изображены на заднем плане приведённой выше иллюстрации, но далее рассмотрим их более подробно.

Авторское право: Герт ван Дейк
А вот и они: мы могли бы вывести интересные формулы для ног – такие, как «зигзиг» для животного, у которого и передние, и задние ноги начинаются с «зига» вперёд (и в котором другие сегменты следуют закономерности, заданной первым сегментом). «Загзиг» обозначает животное, у которого передняя нога начинается с «зага» назад, тогда как задняя нога начинается вперёд. Можете поразмыслить над тем, что, на ваш взгляд, означает «зигзагзиг».

Авторское право: Герт ван Дейк
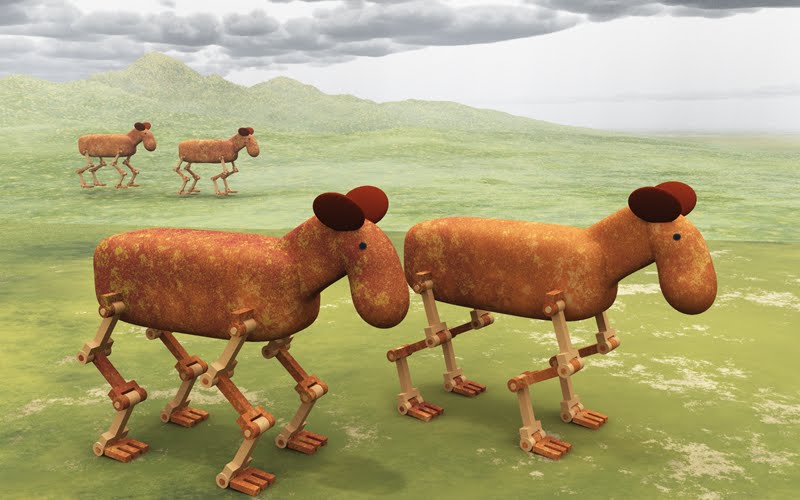
Просто шутки ради – вот вам стадо зверьков. Сколько там должно быть зигзагов? Не знаю. Если есть подходящая ступня, в которой пола касаются сразу многие сегменты, то я бы ожидал, что все они будут изогнуты назад, чтобы способствовать «перекатыванию» по земле. Если земли касается только один сегмент, как у копытных млекопитающих, то я понятия не имею. Однако многие из длинных сегментов будут, скорее всего, расположены зигзагообразно.

Авторское право: Герт ван Дейк
Вот животное, у которого увеличенное количество зигзагов, вместе со своим предком. Лично мне жирафоморф кажется слабым. Чтобы добиться хорошей маневренности и/или хорошей скорости, должно существовать оптимальное количество сегментов, однако я не осмеливаюсь размышлять об этом – по крайней мере, не сейчас. Кроме того, я не знаю, почему лопатка у млекопитающих не сочленена с позвоночным столбом суставами, в отличие от задних ног. Связано ли это больше с амортизацией, чем с движением? Возможно, это хорошие темы для последующих записей.
Оригинал статьи находится здесь.
Перевод на русский язык: П. Волков, 2021